-
 霍爾電壓傳感器廠家現貨
霍爾電壓傳感器廠家現貨若設定比較器周期值為T1PR,當啟動計數器計數時,計數寄存器T1CNT的值在每個周期由0增加至T1PR然后再減為0,如此循環。在每個周期中當出現T1CNT=T1CMPR和T1CNT=T2CMPR時,則相應的PWM波就會發生電平轉換。每一個周期中,當T1CNT=...
2025-05-27 -
 常州大量程電壓傳感器
常州大量程電壓傳感器強磁場是指磁場強度高于商用超導磁體所能達到比較高的磁場,將磁場強度超過20T的磁場定義為強磁場。按照現階段世界上強磁場系統的建設,強磁場系統一般由磁體、電源系統、低溫冷卻系統、測量測試系統和實驗平臺構成。其中磁體是直接產生強磁場的裝置,電源為整個系統的工作提供...
2025-05-27 -
 天津化成分容電壓傳感器詢問報價
天津化成分容電壓傳感器詢問報價輸出濾波電容 C 和輸出電壓中的交流分量關系很大。由于 C 和負載并聯,再加 上容抗的頻率特性, 頻率較高的電流成分主要通過 C,負載中流過的很少。C 兩端的 電壓Vc 除直流分量Vo 外,還有交流分量,與輸出電壓紋波大小對應。為了減小紋波, 加大 C 是有好...
2025-05-27 -
 寧波循環測試電壓傳感器發展現狀
寧波循環測試電壓傳感器發展現狀PWM波可以由DSP芯片內部的事件管理器EVA或EVB產生,在DSP內部,事件管理器EVA和EVB是完全相同的兩個模塊。它們都有3個比較單元,每一個比較單元都可以產生一對互補的PWM波,一共可以提供6路PWM波。在此選用其中的4路來驅動逆變橋上的開關管。4路P...
2025-05-26 -
 蘇州粒子加速器電壓傳感器案例
蘇州粒子加速器電壓傳感器案例為了加強裝置的安全性,大都采用具有變壓器隔離的隔離型方案。從功率角度考慮,當選用的功率開關管的額定電壓和額定電流相同時,裝置的總功率通常和開關管的個數呈正比例關系,故全橋變換器的功率是半橋變換器的2倍,適用于中大功率的場合。基于以上考慮,本方案中補償裝置選用帶...
2025-05-23 -
 惠州粒子加速器電壓傳感器案例
惠州粒子加速器電壓傳感器案例周期中斷子程序和下溢中斷子程序執行流程圖,在每一個周期中分別發生一次周期中斷和下溢出中斷,每進入中斷一次分別更新兩個比較寄存器的值,相應的輸出PWM波的移相也每一個周期都更新。在解決了具有移相角度差的PWM信號的產生問題后,需要解決的另一個問題是怎樣應用采集到...
2025-05-23 -
佛山化成分容電壓傳感器出廠價
第二階段的仿真是在***次仿真的基礎上,加入了高頻變壓器以及負載部分。第二階段仿真時針對整個電路的仿真,主要目的是對控制方案給以理論研究。閉環反饋控制中采用典型的PID控制模式,仿真過程通過對PID參數的調試加深對控制方案的理解,以便在后續主電路調試過程中能更...
2025-05-23 -
蘇州電壓傳感器服務電話
若設定比較器周期值為T1PR,當啟動計數器計數時,計數寄存器T1CNT的值在每個周期由0增加至T1PR然后再減為0,如此循環。在每個周期中當出現T1CNT=T1CMPR和T1CNT=T2CMPR時,則相應的PWM波就會發生電平轉換。每一個周期中,當T1CNT=...
2025-05-22 -
惠州大量程電壓傳感器服務電話
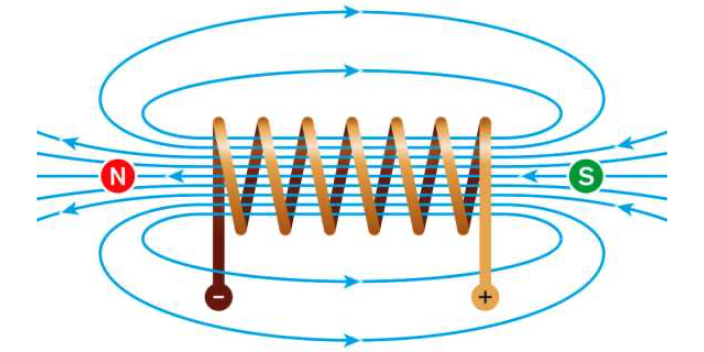
磁現象是物理界中**為基本的現象之一,人們發現,在磁場中,原子、分子的電子態能量和磁矩都發生了變化,于是在科學研究中,很多的實驗都將磁場環境作為實驗的研究背景,磁場也成為了許多科學研究的基本工具。在以強磁場為實驗環境的研究領域,人們已經取得了眾多重大的科研成果...
2025-05-22 -
南京新能源汽車電壓傳感器廠家
從持續時間的角度上分類,強磁場可以分為脈沖強磁場和穩態強磁場。脈沖強磁場可以產生很高的磁場,能為一些科學實驗提供所需要的磁場環境。但磁場持續的時間短,且磁場的強度在短時刻內是脈沖尖峰狀態。穩態強磁場是持續時間相對較長的磁場,并且磁場的強度時保持相對穩定的狀態,...
2025-05-22 -
 珠海新能源電壓傳感器定制
珠海新能源電壓傳感器定制電力電子裝置中很多元件,特別是半導體器件,對電壓電流非常敏感,正確的設置保護電路對電源變換裝置的安全運行至關重要。這里所講的保護主要是針對電源變換裝置里的器件,需要保護的狀態主要包括過電壓和過電流。具體產生過電壓和過電流狀態的原因有電路故障和電路工作原理所致。...
2025-05-21 -
天津功率分析儀電壓傳感器生產廠家
本項目逆變橋臂上有4個開關管,對應需要四個**的驅動電路。可選用的驅動電路有很多種,以驅動電路和IGBT的連接方式可以將驅動電路分為直接驅動、隔離驅動和集成化驅動。在此我們采用集成化驅動,因為相對于分立元件構成的驅動電路,集成化驅動電路集成度更高、速度快、抗干...
2025-05-21 -
 成都內阻測試儀電壓傳感器服務電話
成都內阻測試儀電壓傳感器服務電話為了加強裝置的安全性,大都采用具有變壓器隔離的隔離型方案。從功率角度考慮,當選用的功率開關管的額定電壓和額定電流相同時,裝置的總功率通常和開關管的個數呈正比例關系,故全橋變換器的功率是半橋變換器的2倍,適用于中大功率的場合。基于以上考慮,本方案中補償裝置選用帶...
2025-05-21 -
 珠海化成分容電壓傳感器出廠價
珠海化成分容電壓傳感器出廠價整個電路的控制**終都歸結于對PWM波的控制,對于移相全橋電路來說,**根本的問題也歸結于如何產生可以自由控制相位差的PWM脈沖。DSP產生脈沖一般是由事件管理器的PWM口和DSP模塊中的數字I/O口實現。由于在移相控制中,四路PWM波要么互補要么有對應一定角...
2025-05-20 -
 惠州大量程電壓傳感器廠家現貨
惠州大量程電壓傳感器廠家現貨圖3-6和圖3-7所示分別為輸出端電壓值和電壓紋波(圖中橫縱坐標分別為時間和電壓),經過PID閉環反饋后,輸出電壓值的紋波系數可達0.16%。因為本仿真實驗中只加入了電壓單閉環反饋,進一步提高精度需要再在外環加入電流反饋環。仿真電路很好的驗證了試驗參數計算的正...
2025-05-20 -
 佛山內阻測試儀電壓傳感器單價
佛山內阻測試儀電壓傳感器單價數字控制電路的軟件主要包括主程序、各個模塊初始化程序、周期中斷服務子程序、下溢中斷服務子程序、AD中斷服務子程序、PID調節子程序等幾大部分組成。主程序的主要任務是系統自檢,系統初始化,然后循環執行主程序等待中斷。初始化是對程序中用到的常量、變量進行有意義的賦...
2025-05-20 -
 成都循環測試電壓傳感器廠家直銷
成都循環測試電壓傳感器廠家直銷儲能電容的計算:1)根據工程經驗估算:根據工程實踐經驗,裝置的功率與前端儲能電容有對應的關系。整個裝置的功率P=UI=2060=1.2Kw,每瓦對應儲能電容容量1μF,則可選用電容至少1200μF。2)根據能量關系式計算:儲能電容為后續的DC/DC變換提供直流...
2025-05-20 -
 武漢循環測試電壓傳感器哪家便宜
武漢循環測試電壓傳感器哪家便宜磁體的電源系統已有電容器電源和脈沖發電機電源組成,為了進一步減小脈沖平頂磁場的紋波,我們對磁體的電源系統加以改進,基于電容器電源和脈沖發電機電源,再輔助以基于移相全橋直流變換器的補償電源,**終得到高精度高穩定度的可控脈沖電源。三組電源系統一起向磁體供電。相對...
2025-05-20 -
 霍爾電壓傳感器詢問報價
霍爾電壓傳感器詢問報價強磁場是指磁場強度高于商用超導磁體所能達到比較高的磁場,將磁場強度超過20T的磁場定義為強磁場。按照現階段世界上強磁場系統的建設,強磁場系統一般由磁體、電源系統、低溫冷卻系統、測量測試系統和實驗平臺構成。其中磁體是直接產生強磁場的裝置,電源為整個系統的工作提供...
2025-05-20 -
 北京粒子加速器電壓傳感器生產廠家
北京粒子加速器電壓傳感器生產廠家PWM波可以由DSP芯片內部的事件管理器EVA或EVB產生,在DSP內部,事件管理器EVA和EVB是完全相同的兩個模塊。它們都有3個比較單元,每一個比較單元都可以產生一對互補的PWM波,一共可以提供6路PWM波。在此選用其中的4路來驅動逆變橋上的開關管。4路P...
2025-05-20 -
佛山磁通門電壓傳感器廠家
為移相全橋逆變部分的 Simulink 仿真電路。負載等效至原邊用等值電阻代替,仿真主要調節諧振電容和諧振電感的參數,以滿足所有開關管的零開通和軟關斷。依次為開關管驅動波形、橋臂上電壓波形和橋臂上電流波形。其中驅動波形中從低到高分別為開關管1、2、3、4的驅動...
2025-05-20 -
 佛山循環測試電壓傳感器設計標準
佛山循環測試電壓傳感器設計標準PID調節器是人們在工程實踐中摸索出來的一種實用性強并且控制原理簡單的校正裝置。1)比例項P**當前信息,調節后的輸出與輸入信號呈比例關系,偏差一旦產生,控制器立即作用減少偏差。比例系數增大系統靈敏度增加,系統振蕩增強,大于某限定值時系統會變的不穩定。當*有比...
2025-05-19 -
 蘇州電壓傳感器代理價錢
蘇州電壓傳感器代理價錢電力電子裝置中很多元件,特別是半導體器件,對電壓電流非常敏感,正確的設置保護電路對電源變換裝置的安全運行至關重要。這里所講的保護主要是針對電源變換裝置里的器件,需要保護的狀態主要包括過電壓和過電流。具體產生過電壓和過電流狀態的原因有電路故障和電路工作原理所致。...
2025-05-19 -
惠州化成分容電壓傳感器廠家
本項目逆變橋臂上有4個開關管,對應需要四個**的驅動電路。可選用的驅動電路有很多種,以驅動電路和IGBT的連接方式可以將驅動電路分為直接驅動、隔離驅動和集成化驅動。在此我們采用集成化驅動,因為相對于分立元件構成的驅動電路,集成化驅動電路集成度更高、速度快、抗干...
2025-05-19 -
天津新能源汽車電壓傳感器廠家直銷
A/D模塊無疑是將我們采集到的模擬信號轉換成DSP模塊可以識別和處理的數字信號,市場上可選用的A/D芯片種類很多。我們選用芯片須得根據工程實際。選用 A/D 芯片我們重點關注如下幾點: 1)精 度(對應 AD 的分辨率),如果工程中對信號的精度要求很高,則必須...
2025-05-19 -
南京新能源電壓傳感器價格大全
在電路的控制環節,設計了硬件控制電路并編寫了相應的控制程序。硬件電路基于DSP控制芯片,主要由電源模塊、采樣及A/D轉換模塊、DSP控制模塊、PWM輸出模塊、驅動電路模塊構成。在程序方面,本文著重對移相脈波產生的方式、PID反饋控制的策略進行了研究,同時也完成...
2025-05-19 -
 珠海循環測試電壓傳感器報價
珠海循環測試電壓傳感器報價從持續時間的角度上分類,強磁場可以分為脈沖強磁場和穩態強磁場。脈沖強磁場可以產生很高的磁場,能為一些科學實驗提供所需要的磁場環境。但磁場持續的時間短,且磁場的強度在短時刻內是脈沖尖峰狀態。穩態強磁場是持續時間相對較長的磁場,并且磁場的強度時保持相對穩定的狀態,...
2025-05-19 -
佛山功率分析儀電壓傳感器廠家
由移相全橋電路的拓撲結構圖可以看到,四個橋臂上每個開關管都并聯有諧振電容,諧振電容的存在可以實現開關管的零電壓關斷。所以我們只需要關心開關管的零電壓開通,要實現開關管的零電壓開通,必須在開關管觸發開通前,有足夠的能量中和掉諧振電容上的電荷,并且要完成該開關管同...
2025-05-19 -
無錫霍爾電壓傳感器出廠價
PID調節器是人們在工程實踐中摸索出來的一種實用性強并且控制原理簡單的校正裝置。1)比例項P**當前信息,調節后的輸出與輸入信號呈比例關系,偏差一旦產生,控制器立即作用減少偏差。比例系數增大系統靈敏度增加,系統振蕩增強,大于某限定值時系統會變的不穩定。當*有比...
2025-05-16 -
北京磁調制電壓傳感器廠家直銷
圖3-6和圖3-7所示分別為輸出端電壓值和電壓紋波(圖中橫縱坐標分別為時間和電壓),經過PID閉環反饋后,輸出電壓值的紋波系數可達0.16%。因為本仿真實驗中只加入了電壓單閉環反饋,進一步提高精度需要再在外環加入電流反饋環。仿真電路很好的驗證了試驗參數計算的正...
2025-05-16