-
 大連工業質檢汽車面漆檢測設備生產廠家
大連工業質檢汽車面漆檢測設備生產廠家車漆作為汽車直接的外在保護,老化程度肯定也是快的,但是車漆的保養卻是容易被車主忽略的,很多車主甚至認為,常規的刷車就算給車漆做保養了。那么應該如何去養護才能防止車漆開裂生銹呢?小編就說幾個比較簡單的預防車漆生銹的細節,讓您的愛車永遠年輕。1.把車盡量停放在室內盡管汽車車身都經過防銹處理,但如果一些螺栓表面涂層被破壞,遇水就容易生銹,因此保證車輛停放在干燥環境中是對車子有益的,特別是長時間停車。2.好不要罩車衣車輛停在室外,如遇上刮風下雨的天氣,車衣的內層就會反復抽打車漆,尤其是車衣內附著的泥沙,會在車身上劃出無數道細小的劃痕,時間一長還會造成漆面發烏。另外,風沙過后不要直接用撣子或抹布...
2022-08-19 -
 襄陽工業質檢汽車面漆檢測設備生產廠家
襄陽工業質檢汽車面漆檢測設備生產廠家深度學習算法主要是數據驅動進行特征提取和分類決策,根據大量樣本的學習能夠得到深層的、數據集特定的特征表示,其對數據集的表達更高效和淮確、所提取的抽象特征魯棒性更強,泛化能力更好,但檢測結果受樣本集的影響較大。深度學習通過大量的缺陷照片數據樣本訓練而得到缺陷判別的模型參數,建立出一套缺陷判別模型,終目標是讓機器能夠像人一樣具有分析學習能力能夠識別缺陷。深度學習算法基于TensorFlow和Keras框架,常用的深度學習算法有ResNet、MobileNet、MaskR-CNN和FasterR-CNN等。FasterR-CNN是以RPN(注意力網絡)和CNN(卷積神經網絡)為算法框架,...
2022-08-18 -
 本溪光學方法汽車面漆檢測設備供應商
本溪光學方法汽車面漆檢測設備供應商傳統圖像算法中特征提取主要依賴人工設計的提取器,需要有專業知識及復雜的參數調整過程,分類決策也需要人工構建規則引擎,每個方法和規則都是針對具體應用的.泛化能力及魯棒性較差。具體到缺陷檢測的應用場景,需要先對缺陷在包括但不限于顏色、灰度、形狀、長度等的一個或多個維度上進行量化規定,再根據這些量化規定在圖像上尋我符合條件的特征區域,并進行標記。傳統圖像處理有很多算法庫,如Halcon、VisionPro和OpenCV等,一般采用編程語言調用算法庫的形式來實現。常用的經典檢測算法有Roberts算子,Sobel算子,Previtt算子,IOG算子和Canny算子等.Canny算子是1種邊...
2022-08-18 -
呼和浩特汽車面漆檢測設備質量好價格憂的廠家
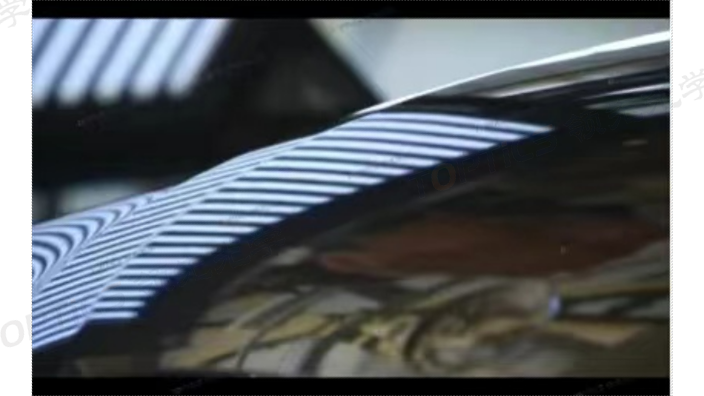
1)讀取橫條紋圖像組,對橫條紋圖像分別進行橫向條紋分割得到橫向亮條紋圖像和橫向暗條紋圖像,針對橫向亮條紋圖像進行二值化、邊緣腐蝕,得到橫向亮條紋檢測區域,在橫條紋圖像組中分別分割出橫向亮條紋灰度檢測區域,對橫向亮條紋灰度檢測區域進行二值化與特征提取,提取得到橫向亮條紋中的外觀缺陷;同樣依據上述處理過程可得到橫向暗條紋圖像中的外觀缺陷;步驟(2)讀取豎條紋圖像組,對豎條紋圖像分別進行橫向條紋分割得到豎向亮條紋圖像和豎向暗條紋圖像,針對豎向亮條紋圖像進行二值化、邊緣腐蝕,得到豎向亮條紋檢測區域,在豎條紋圖像組中分別分割出豎向亮條紋灰度檢測區域,對豎向亮條紋灰度檢測區域進行二值化與特征提取,...
2022-08-18 -
 黃石代替人工汽車面漆檢測設備供應商家
黃石代替人工汽車面漆檢測設備供應商家在汽車生產過程中,車輛涂裝是一個重要環節。其主要作用為車輛提供外觀裝飾及長期的防腐蝕性。車輛涂裝會存在瑕疵問題,噴涂結束后需要進行瑕疵檢測及修補。如今,常規的漆膜缺陷尋找、判定以及標記等都是由人工完成,在噴涂線之后設置面漆檢查線。根據檢查區域設置高度不同的工位,需要配置不同角度的光源和檢查人員等,因此常規的人工檢查線不僅空間占據過大而且需要過多的人員配置,存在耗時過長、效率低下及受人為因素影響等缺點。漆面瑕疵檢查是制約涂裝車身質量的關鍵因素。實現車身A區、B區的漆面全自動檢測,檢出率高達99%以上。黃石代替人工汽車面漆檢測設備供應商家汽車面漆檢測設備 深度學習算法主要是數據驅動進行特...
2022-08-18 -
 長春汽車面漆檢測設備生產廠家
長春汽車面漆檢測設備生產廠家汽車在人們的日常生活中使用非常普遍,成為人們出行的首要交通工具。在汽車的生產過程中,噴漆的好壞直觀的反應了汽車外觀的優劣,但在噴漆過程中不可避免存在雜質點,這會導致噴漆后漆面存在凹凸點等外觀缺陷,另外在漆面零件的組裝過程中,不可避免會造成漆面的碰擦,這會導致組裝后的車輛中存在部分劃傷、掉漆等外觀缺陷,外觀缺陷的存在在汽車銷售中將不可避免的產生銷售和生產的糾紛,為避免上述糾紛的產生,在汽車出廠前進行整車漆面的檢測非常有必要。目前的汽車漆面的檢測手段主要為目視法,目視法受所檢測人的熟練程度影響較大,主觀性較強,另外由于漆面為高反射面,受光照角度影響非常大,人目視不可避免會存在較多漏檢,而且...
2022-08-18 -
 蕪湖汽車面漆檢測設備供應商
蕪湖汽車面漆檢測設備供應商所述轉動腔內的所述第四轉軸末端固定設置有與所述蝸桿外表面固定設置的第三錐齒輪嚙合的第四錐齒輪,手動轉動所述手動輪半周,此時所述第四轉軸帶動所述第四錐齒輪轉動,從而帶動所述第三錐齒輪轉動,從而帶動所述蝸桿轉動,從而帶動所述蝸輪轉動,所述蝸輪轉動帶動所述diyi轉軸轉動半周。進一步地,所述轉動腔左右兩側對稱設置有儲液腔,左右兩個所述儲液腔分別盛放油漆與拋光液,左右兩個所述儲液腔之間固定設置有三通閥,所述三通閥左右兩側通過所述diyi連通管與所述儲液腔連通,所述三通閥底部通過所述第二連通管連通所述儲液腔,當所述機身遠離需要補油漆的汽車表面時所述三通閥將左側的所述diyi連通管與所述第二連通管...
2022-08-17 -
 鞍山全自動汽車面漆檢測設備價格
鞍山全自動汽車面漆檢測設備價格深度學習算法主要是數據驅動進行特征提取和分類決策,根據大量樣本的學習能夠得到深層的、數據集特定的特征表示,其對數據集的表達更高效和淮確、所提取的抽象特征魯棒性更強,泛化能力更好,但檢測結果受樣本集的影響較大。深度學習通過大量的缺陷照片數據樣本訓練而得到缺陷判別的模型參數,建立出一套缺陷判別模型,終目標是讓機器能夠像人一樣具有分析學習能力能夠識別缺陷。深度學習算法基于TensorFlow和Keras框架,常用的深度學習算法有ResNet、MobileNet、MaskR-CNN和FasterR-CNN等。FasterR-CNN是以RPN(注意力網絡)和CNN(卷積神經網絡)為算法框架,...
2022-08-17 -
 九江高精度汽車面漆檢測設備質量好價格憂的廠家
九江高精度汽車面漆檢測設備質量好價格憂的廠家從而帶動所述第二錐齒輪38轉動,從而帶動所述diyi錐齒輪43轉動,此時所述螺紋套41轉動帶動所述螺紋桿40移動,從而帶動左右兩個所述滑動塊46移動,所述滑動塊46移動帶動所述拋光輪44移動,由于此時所述機身10處于靠近需要補油漆的汽車表面一側,所述三通閥56將右側的所述diyi連通管55與所述第二連通管57連通,此時啟動所述氣泵17時,所述噴頭16能夠噴射出拋光液從而對汽車表面進行油漆覆蓋,同時啟動所述diyi電機45帶動所述拋光輪44轉動,所述拋光輪44自轉同時沿螺旋線移動,當所述滑動塊46移動至*右側時啟動所述第二電機48帶動所述第三轉軸51反轉,多次重復上述操作,從而對修補后的...
2022-08-17 -
南昌非隧道式汽車面漆檢測設備供應商
從而帶動所述第二錐齒輪38轉動,從而帶動所述diyi錐齒輪43轉動,此時所述螺紋套41轉動帶動所述螺紋桿40移動,從而帶動左右兩個所述滑動塊46移動,所述滑動塊46移動帶動所述拋光輪44移動,由于此時所述機身10處于靠近需要補油漆的汽車表面一側,所述三通閥56將右側的所述diyi連通管55與所述第二連通管57連通,此時啟動所述氣泵17時,所述噴頭16能夠噴射出拋光液從而對汽車表面進行油漆覆蓋,同時啟動所述diyi電機45帶動所述拋光輪44轉動,所述拋光輪44自轉同時沿螺旋線移動,當所述滑動塊46移動至*右側時啟動所述第二電機48帶動所述第三轉軸51反轉,多次重復上述操作,從而對修補后的...
2022-08-17 -
 龍巖光學方法汽車面漆檢測設備哪家好
龍巖光學方法汽車面漆檢測設備哪家好漆面缺陷自動檢測系統可實現不同車型油漆車身表面缺陷的自動化檢測。系統基于3D視覺成像原理,結合先進的圖像處理與機器學習技術,快速可靠地識別瑕疵,實現漆面缺陷實時檢測、自動分類與測量.適用于涂裝車間面漆線烘房后端,在面漆烘干后進行表面缺陷檢測,檢測結果用于后端工人或機器人打磨、拋光。臟污類缺陷(如臟點、纖維等)與變形類缺陷(如縮孔、坑包等)均可檢測,小可檢尺寸高達0.2mm,檢出率高達99%以,各種顏色表面(包括黑、白、灰、紅、藍等)均可實現精細。 很大程度的保證了高亮漆面的表面外觀缺陷檢測效果,避免了雜散光對檢測結果的影響。龍巖光學方法汽車面漆檢測設備哪家好汽車面漆檢測設備 ...
2022-08-17 -
 安徽偏折光學法汽車面漆檢測設備質量好價格憂的廠家
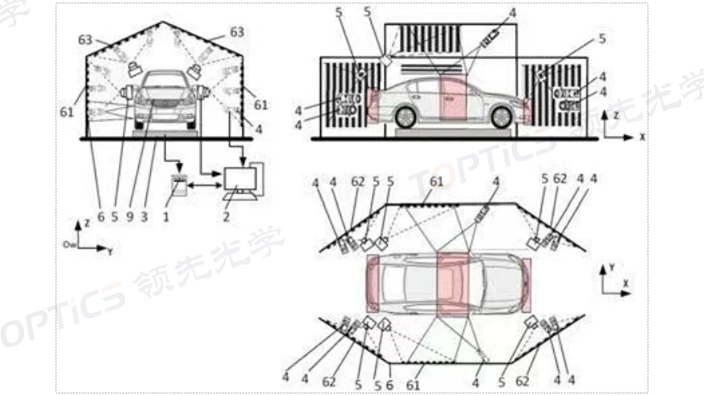
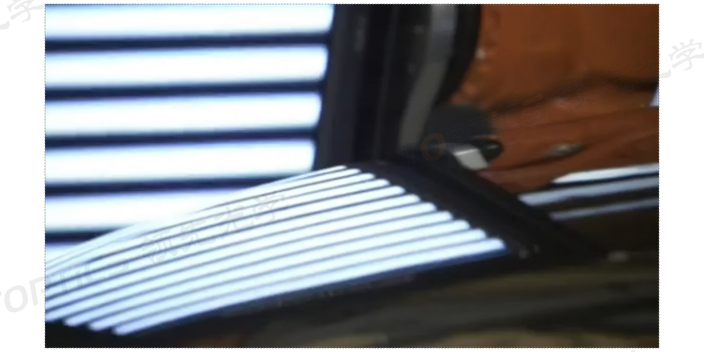
安徽偏折光學法汽車面漆檢測設備質量好價格憂的廠家將39個工業視覺傳感器固定于車身周圍,進行涂裝表面圖像獲取,保證每個傳感器都能固定獲取并檢測對應的區域范圍,并通過所有傳感器的合理分布,使得檢測的總區域將車身表面全覆蓋。系統以LED紅色高亮光帶為光源,在車身行進的同時,對車身涂膜表面進行高清掃描,從每輛車上可以獲取3萬張以上的高清圖像,而后通過高性能計算機處理中心對圖像數據進行處理,進而根據算法分析出接測結果,并通過數據輸出,自動指出其缺陷位置。該技術對于車身涂裝缺陷的檢測與識別主要依靠缺陷表面與正常涂裝表面的反射光差異,在光的反射定律下,車身涂裝平面形成的反射光具有典型特征,當視覺傳感器接收到與預設光線不同的信號時,就可以大概判斷其...
2022-08-16 -
 泉州光學方法汽車面漆檢測設備推薦
泉州光學方法汽車面漆檢測設備推薦機器視覺近年來大受歡迎,尤其是在制造業。公司可以從該技術增強的靈活性、減少產品故障和提高整體生產質量中獲益。機器獲取圖像、評估圖像、解釋情況然后做出適當響應的能力稱為機器視覺。智能相機、圖像處理和軟件都是系統的一部分。由于成像技術、智能傳感器、嵌入式視覺、機器和監督學習、機器人接口、信息傳輸協議和圖像處理能力方面的重大進步,視覺技術可以在許多層面上為制造業提供幫助。通過減少人為錯誤并確保對通過生產線的所有貨物進行質量檢查,視覺系統提高了產品質量。根據數據研究報告,到2028年底,工業機器視覺市場價值,預計將以。此外,具有更高產品質量措施的制造單位或工廠的檢驗需求增加,可能會推動人工...
2022-08-16 -
景德鎮非隧道式汽車面漆檢測設備供應商家
為了提高車身漆面缺陷檢測的效率和準確性,本研究利用計算機視覺技術和深度學習方法,以小樣本為基礎實現了車身漆面缺陷的自動檢測。首先,為了實時采集車身油漆缺陷圖像,本文提出了一種新的數據增強算法,以增強數據庫處理小樣本數據過擬合現象的能力。針對汽車涂料固有的缺陷特征,通過改進MobileNet-SSD網絡的特征層,優化邊界框的匹配策略,提出了一種改進的MobileNet-SSD算法,用于油漆缺陷的自動檢測。實驗結果表明,改進的MobileNet-SSD算法可以檢測出六種傳統車身漆膜的缺陷,準確率超過95%,比傳統SSD算法快10%,可以實現實時、準確的車身漆面缺陷檢測。車身主要由鋼制成,長...
2022-08-16 -
 漳州工業質檢汽車面漆檢測設備哪家好
漳州工業質檢汽車面漆檢測設備哪家好機器視覺近年來大受歡迎,尤其是在制造業。公司可以從該技術增強的靈活性、減少產品故障和提高整體生產質量中獲益。機器獲取圖像、評估圖像、解釋情況然后做出適當響應的能力稱為機器視覺。智能相機、圖像處理和軟件都是系統的一部分。由于成像技術、智能傳感器、嵌入式視覺、機器和監督學習、機器人接口、信息傳輸協議和圖像處理能力方面的重大進步,視覺技術可以在許多層面上為制造業提供幫助。通過減少人為錯誤并確保對通過生產線的所有貨物進行質量檢查,視覺系統提高了產品質量。根據數據研究報告,到2028年底,工業機器視覺市場價值,預計將以。此外,具有更高產品質量措施的制造單位或工廠的檢驗需求增加,可能會推動人工智能...
2022-08-16 -
南平偏折光學法汽車面漆檢測設備源頭廠家
1.一種基于機器視覺的漆面瑕疵檢查系統,其特征在于:包括plc模塊、圖像采集模塊、圖像處理模塊及圖像分析模塊;所述plc模塊,用于當檢測車輛到達檢測區域,啟動瑕疵檢測程序,并根據檢測到的車身前進距離,對車身上的瑕疵進行精細定位;所述圖像采集模塊,包括光源模塊、相機陣列模塊及圖像采集程序模塊;所述圖像處理模塊,用于對待測車輛的圖像進行處理,識別車身上的瑕疵,并對識別到的瑕疵進行分析,判定瑕疵類別及大小;所述圖像分析模塊,用于結合車身三維數據、所述plc模塊傳輸的車身前近距離數據確定瑕疵在車上的位置,并在圖像上進行標記。2.根據權利要求1所述的基于機器視覺的漆面瑕疵檢查系統,其特征在于...
2022-08-16 -
丹東工業質檢汽車面漆檢測設備供應商家
將39個工業視覺傳感器固定于車身周圍,進行涂裝表面圖像獲取,保證每個傳感器都能固定獲取并檢測對應的區域范圍,并通過所有傳感器的合理分布,使得檢測的總區域將車身表面全覆蓋。系統以LED紅色高亮光帶為光源,在車身行進的同時,對車身涂膜表面進行高清掃描,從每輛車上可以獲取3萬張以上的高清圖像,而后通過高性能計算機處理中心對圖像數據進行處理,進而根據算法分析出接測結果,并通過數據輸出,自動指出其缺陷位置。該技術對于車身涂裝缺陷的檢測與識別主要依靠缺陷表面與正常涂裝表面的反射光差異,在光的反射定律下,車身涂裝平面形成的反射光具有典型特征,當視覺傳感器接收到與預設光線不同的信號時,就可以大概判斷其...
2022-08-15 -
呼和浩特快速汽車面漆檢測設備生產廠家
由此可以建立如下公式進行計算,由此即可形成更加直觀且定量的自動檢測系統缺陷檢出率和單車誤報的評價指標。缺陷檢出率=檢出缺陷/檢出缺陷+未檢出缺陷×100%;系統單車誤報=總誤報缺陷個數/總檢查車輛數量。為了進一步驗證自動檢測系統的檢測成效,還應建立相應的工作組,由規劃、質保和涂裝車間進行有效結合,一方面保證每日生產線上有效落實Audit查驗車身的方式,另一方面就要在每日生產的過程中,進行一定數量的自動檢測系統車身檢驗,并將自動檢測結果與Audit檢查結果進行對照,由此獲悉檢出缺陷、未檢測出缺陷和誤報缺陷等相關的數據。此外,針對不同車身顏色的情況,還可以建立檢出率和單車誤報的統計表。自動...
2022-08-15 -
 撫順汽車面漆檢測設備質量好價格憂的廠家
撫順汽車面漆檢測設備質量好價格憂的廠家機器視覺近年來大受歡迎,尤其是在制造業。公司可以從該技術增強的靈活性、減少產品故障和提高整體生產質量中獲益。機器獲取圖像、評估圖像、解釋情況然后做出適當響應的能力稱為機器視覺。智能相機、圖像處理和軟件都是系統的一部分。由于成像技術、智能傳感器、嵌入式視覺、機器和監督學習、機器人接口、信息傳輸協議和圖像處理能力方面的重大進步,視覺技術可以在許多層面上為制造業提供幫助。通過減少人為錯誤并確保對通過生產線的所有貨物進行質量檢查,視覺系統提高了產品質量。根據數據研究報告,到2028年底,工業機器視覺市場價值,預計將以。此外,具有更高產品質量措施的制造單位或工廠的檢驗需求增加,可能會推動人工智能...
2022-08-15 -
 齊齊哈爾工業質檢汽車面漆檢測設備供應商
齊齊哈爾工業質檢汽車面漆檢測設備供應商基于計算機視覺的表面缺陷自動檢測作為一種快速發展的新型檢測技術,具有速度快、效率高等優點,已經成功應用到多個行業。將其應用到汽車車身漆膜缺陷檢測領域,可改變現在人工檢測耗時過長、一次檢出率低等缺陷,同時可以降低人工成本。主要介紹了漆膜缺陷自動檢測技術的原理、特點,以及在一些生產線中的應用實例,總結了現狀及存在的問題,并對其應用前景做了展望。汽車涂裝是汽車生產過程中重要的一個環節,主要為汽車提供外觀裝飾性和長期的防腐蝕性能。常規的汽車涂裝過程中,噴涂后的車身需要進行漆膜表面的缺陷檢測和修飾。目前,噴涂后車身漆膜檢測主要通過人工目視的方法完成,存在耗時過長、效率低下及受人為因素影響等缺點,...
2022-08-15 -
 龍巖代替人工汽車面漆檢測設備哪家好
龍巖代替人工汽車面漆檢測設備哪家好所述花鍵孔25內可滑動的設置有末端伸入所述鎖定槽21內的花鍵桿23,所述花鍵桿23與所述花鍵孔25端壁間設置有復位彈簧26,當向下按壓所述機身10時,所述花鍵桿23自上而下依次卡入所述鎖定槽21內,從而調整機身10與所述汽車表面距離,所述機身10上方設置有可轉動的手動輪27,將所述手動輪27轉動半周通過所述機身10頂壁內設置的聯動裝置98可以帶動所述花鍵桿23轉動半周,此時所述機身10再所述頂壓彈簧12作用下上移。有益地,所述傳動裝置99包括所述傳動腔42頂壁內設置的齒輪腔50,所述齒輪腔50與所述傳動腔42之間轉動設置有第二轉軸36,所述第二轉軸36頂部末端轉動設置于所述轉動腔14頂...
2022-08-15 -
寧德高精度汽車面漆檢測設備推薦廠家
機器視覺近年來大受歡迎,尤其是在制造業。公司可以從該技術增強的靈活性、減少產品故障和提高整體生產質量中獲益。機器獲取圖像、評估圖像、解釋情況然后做出適當響應的能力稱為機器視覺。智能相機、圖像處理和軟件都是系統的一部分。由于成像技術、智能傳感器、嵌入式視覺、機器和監督學習、機器人接口、信息傳輸協議和圖像處理能力方面的重大進步,視覺技術可以在許多層面上為制造業提供幫助。通過減少人為錯誤并確保對通過生產線的所有貨物進行質量檢查,視覺系統提高了產品質量。根據數據研究報告,到2028年底,工業機器視覺市場價值,預計將以。此外,具有更高產品質量措施的制造單位或工廠的檢驗需求增加,可能會推動人工...
2022-08-14 -
 呼和浩特全自動汽車面漆檢測設備供應商家
呼和浩特全自動汽車面漆檢測設備供應商家當所述機身10遠離需要補油漆的汽車表面時所述三通閥56將左側的所述diyi連通管55與所述第二連通管57連通,此時啟動所述氣泵17時,所述噴頭16能夠噴射出油漆,當所述機身10貼近需要補油漆的汽車表面時所述三通閥56將右側的所述diyi連通管55與所述第二連通管57連通,此時啟動所述氣泵17時所述噴頭16能噴射出拋光液,此時配合所述拋光輪44轉動可實現汽車外漆拋光。,本實施例所述固定連接方法包括但不限于螺栓固定、焊接等方法。如圖1-4所示,本發明的設備在初始狀態時,所述機身10與所述限位塊24貼合,所述花鍵桿23末端斜面朝下,所述第二連通管57與左側的所述diyi連通管55連通。整個裝...
2022-08-14 -
天津高精度汽車面漆檢測設備哪家好
圖像處理單元通過使用一系列算法對圖片進行處理,獲得缺陷3D或2D特征,通過與數據庫比對之后,獲得缺陷位置、分類、尺寸等信息,然后將數據進行輸出。漆膜缺陷自動檢測系統構成汽車車身長度一般在~m,寬度在~m,而且車身曲面多,結構比較復雜。為了能將車身外表所有區域都覆蓋到,需要增加光源和相機數量或者將光源和相機安裝在機器人等可移動設備上,目前研究和應用較多的主要有以下2種結構:1)將光源和CCD相機安裝到包圍車身的鋼結構框架上,通過增加光源和CCD相機數量的方式覆蓋整個車身。這種結構的優點是結構簡單,調試時只需要調整相機角度,耗時短。缺點是柔性低,不同的車型外形有較大差異時不能通用。2)將光...
2022-08-14 -
鄭州非隧道式汽車面漆檢測設備推薦
汽車漆面為什么要鍍膜汽車漆面為什么要鍍膜保護車漆,延長愛車使用壽命,需要對其進行悉心的護理。常見的汽車美容護理方法有打蠟、拋光、封釉、鍍膜等,而其中鍍膜是大部分車主較為熱衷的保養方法。下面就和電動邦小編一起圍觀汽車漆面為什么要鍍膜吧。光學鍍膜是什么——何為鍍膜汽車鍍膜劑的主要成分PTFE是人類所掌握的光滑物質之一,這種極度光滑的材質能使你的汽車不沾灰,神奇地保持干凈,甚至水都無法沾在漆膜上,因而用水就可以很輕易地沖洗掉附著在車漆面上的任何臟物。“汽車漆面保護膜”技術是運用玻璃纖維素、硅素聚合物、氟素聚合物和高純水等非石油環保材料,在車漆表面形成一層不氧化的保護層,將車漆和外界完全隔離起...
2022-08-14 -
蕪湖光學方法汽車面漆檢測設備生產廠家
本發明涉及汽配領域,尤其是一種汽車外漆修補拋光一體機。背景技術:隨著社會的進步和經濟的發展,汽車進入了千家萬戶,汽車再駕駛過程中難免存在磕碰劃痕,傳統的劃痕修補方法需要將劃痕周邊貼上紙張避免補漆時造成周邊汽車表面油漆被污染,這種方法操作不便且容易損壞汽車表層油漆,傳統的補漆設備需要人手動噴涂,導致噴涂不均勻,因此有必要設置一種汽車外漆修補拋光一體機改善上述問題。技術實現要素:本發明的目的在于提供一種汽車外漆修補拋光一體機,能夠克服現有技術的上述缺陷,從而提高設備的實用性。本發明解決其技術問題所采用的技術方案是:本發明的一種汽車外漆修補拋光一體機,包括機身以及設置于所述機身底壁內開口向下...
2022-08-14 -
 馬鞍山高精度汽車面漆檢測設備推薦
馬鞍山高精度汽車面漆檢測設備推薦1)讀取橫條紋圖像組,對橫條紋圖像分別進行橫向條紋分割得到橫向亮條紋圖像和橫向暗條紋圖像,針對橫向亮條紋圖像進行二值化、邊緣腐蝕,得到橫向亮條紋檢測區域,在橫條紋圖像組中分別分割出橫向亮條紋灰度檢測區域,對橫向亮條紋灰度檢測區域進行二值化與特征提取,提取得到橫向亮條紋中的外觀缺陷;同樣依據上述處理過程可得到橫向暗條紋圖像中的外觀缺陷;步驟(2)讀取豎條紋圖像組,對豎條紋圖像分別進行橫向條紋分割得到豎向亮條紋圖像和豎向暗條紋圖像,針對豎向亮條紋圖像進行二值化、邊緣腐蝕,得到豎向亮條紋檢測區域,在豎條紋圖像組中分別分割出豎向亮條紋灰度檢測區域,對豎向亮條紋灰度檢測區域進行二值化與特征提取,...
2022-08-13 -
 三明高精度汽車面漆檢測設備品牌
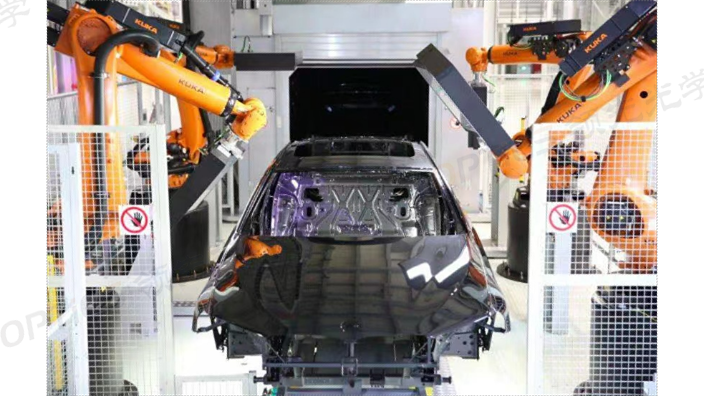
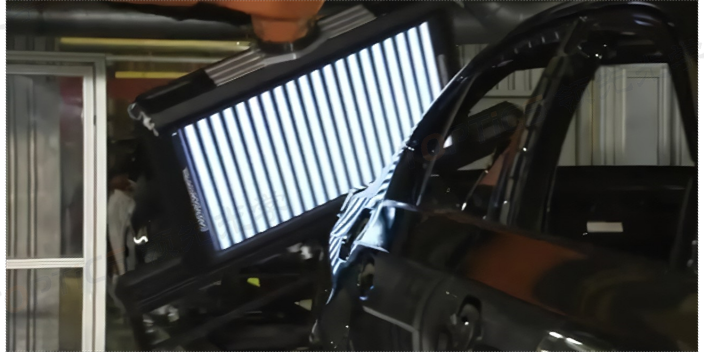
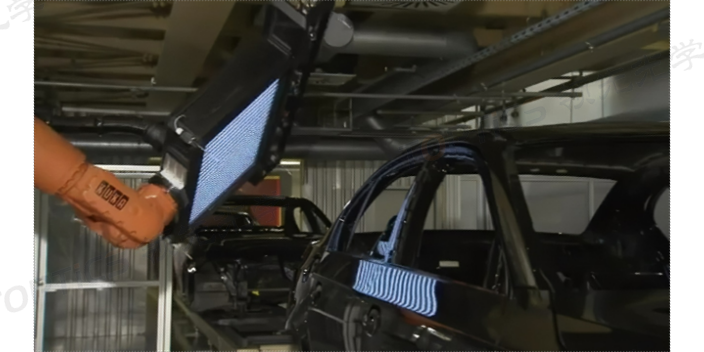
三明高精度汽車面漆檢測設備品牌機器人式缺陷檢測系統采用機器人來布置光源和相機。該系統的檢測硬件由4臺搭載檢測單元的機器人組成,安裝在面漆烘房出口的在線檢查工位。檢測單元將光源和相機集成在一個單元中.亮點是一塊可顯示不同光源模式的LED顯示屏。車身的每一處位置會通過不同的光源模式(單色光、條紋光等)在不同方向上進行多次檢測,通過疊加采樣實現2D圖像+3D輪廓的圖像識別方式。機器人式缺陷檢測系統可以實現小,比較大可實現單線60JP1的檢測能力,單線投資1500~2000萬元。機器人式缺陷檢測系統識別精度高,受益于其多次檢測+疊加采樣的圖像采集方式,對于凹凸、縮孔等3D缺陷識別效率較高。但鑒套系統結構較復雜,1個檢測...
2022-08-13 -
 宜昌趨勢性汽車面漆檢測設備
宜昌趨勢性汽車面漆檢測設備比如某豪華汽車公司規定,在引擎蓋表面不允許出現直徑超過2mm的顆粒缺陷,直徑在1~2mm之間的顆粒不能超過1個,任意100cm2的范圍內直徑在1mm以下的顆粒不能超過2個,否則就判定為不合格,需要進行打磨拋光等修飾處理。常規的漆膜缺陷尋找、判定以及標記等都是由人工完成,在噴涂線之后設置面漆檢查線。根據檢查區域設置高度不同的工位,需要配置不同角度的光源和檢查人員等,因此常規的人工檢查線不僅空間占據過大而且需要過多的人員配置。2漆膜缺陷自動檢測系統原理及結構計算機視覺是將圖像處理、計算機圖形學、模式識別、計算機技術、人工智能等眾多學科高度集成和有機結合而形成的一門綜合性技術。一般地說,計算...
2022-08-13 -
鄭州全自動汽車面漆檢測設備哪家好
所述花鍵孔25內可滑動的設置有末端伸入所述鎖定槽21內的花鍵桿23,所述花鍵桿23與所述花鍵孔25端壁間設置有復位彈簧26,當向下按壓所述機身10時,所述花鍵桿23自上而下依次卡入所述鎖定槽21內,從而調整機身10與所述汽車表面距離,所述機身10上方設置有可轉動的手動輪27,將所述手動輪27轉動半周通過所述機身10頂壁內設置的聯動裝置98可以帶動所述花鍵桿23轉動半周,此時所述機身10再所述頂壓彈簧12作用下上移。有益地,所述傳動裝置99包括所述傳動腔42頂壁內設置的齒輪腔50,所述齒輪腔50與所述傳動腔42之間轉動設置有第二轉軸36,所述第二轉軸36頂部末端轉動設置于所述轉動腔14頂...
2022-08-13