氣動可編程超疏水表面
氣動可編程超疏水表面
人為調節表面潤濕性在科研與工程中具有重要意義。自然界的壁虎、樹蛙、章魚與跳蟲提供了基于表面結構形態轉變來實時調節潤濕性的仿生學途徑。基于智能響應材料的表面結構形態轉變受制于材料科學的發展。為此,上海交通大學機械與動力工程學院胡松濤副教授團隊結合微流控技術,基于常規材料開發了一種氣動可編程超疏水表面,實現了潤濕性的原位調節以及液滴操縱(圖1),在抗液防冰、農業灌溉、能量采集、液滴操縱等領域具有應用前景。廣州實驗室曹小寶副研究員團隊、英國帝國理工學院Daniele Dini教授團隊、瑞士蘇黎世聯邦理工學院Andrew deMello教授團隊與香港城市大學王鉆開教授團隊為合作方。法國巴黎高等物理化工學院的 David Quéré 教授針對該研究內容發表了評論文章。(評論文章內容請見本文文末。)
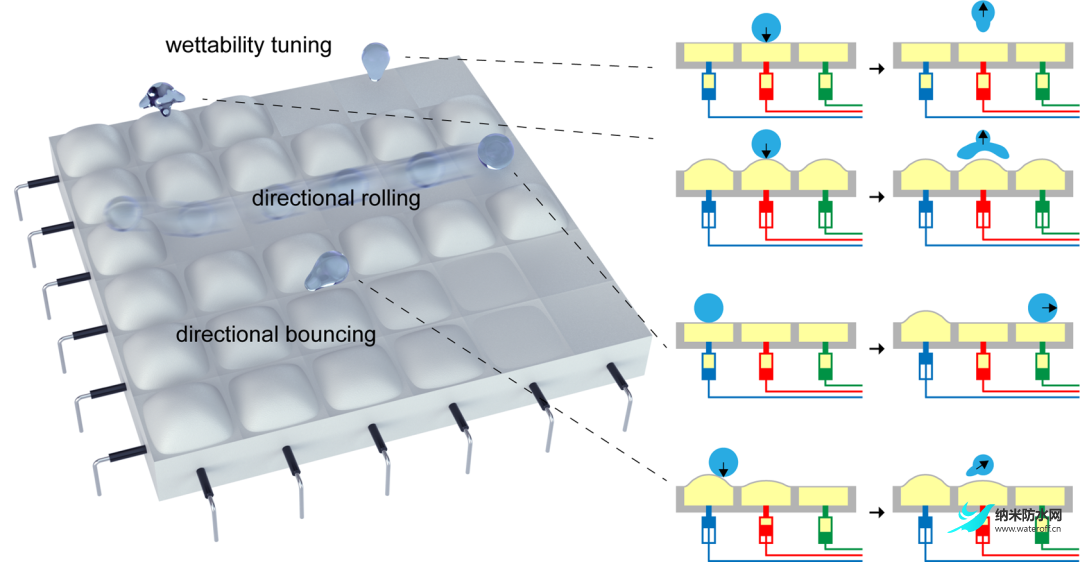
圖1 氣動可編程超疏水表面的概念設計
每個可編程單元通過微流道連接微流控系統,由氣壓的通斷與大小來實現**的形態轉變(圖2a)。依據氣壓占空比與單元形變量的關聯,采用脈沖寬度調制方法實現了基于單個壓力源的多壓力模擬(圖2b)。
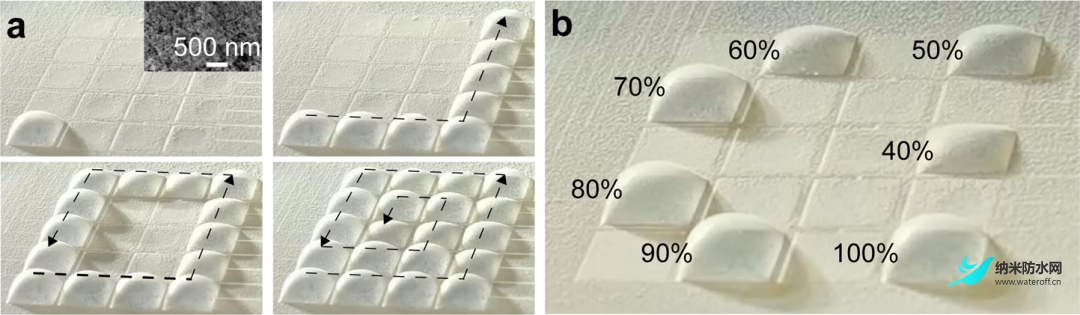
圖2 氣動可編程超疏水表面的形態控制
液滴沖擊實驗表明,隨著沖擊位置與韋伯數的變化,液滴反彈形狀呈現燈泡型(保齡瓶型)、章魚型、花朵型與濺射花朵型。相較于傳統的燈泡型,章魚型與花朵型有助于縮短固液接觸時間,比較大幅值達到46.8%(圖3a),可歸因于剛柔混合作用機制:一方面,單元變形后產生的凹凸曲率造成液滴的非對稱再分布;另一方面,凸起單元在沖擊載荷作用下發生形變,與液滴串聯成雙彈簧振子動力學系統(圖3b)。進一步的理論分析表明,章魚型液滴的“觸手”總是沿著凸起單元比較大曲率方向(圖3c)。
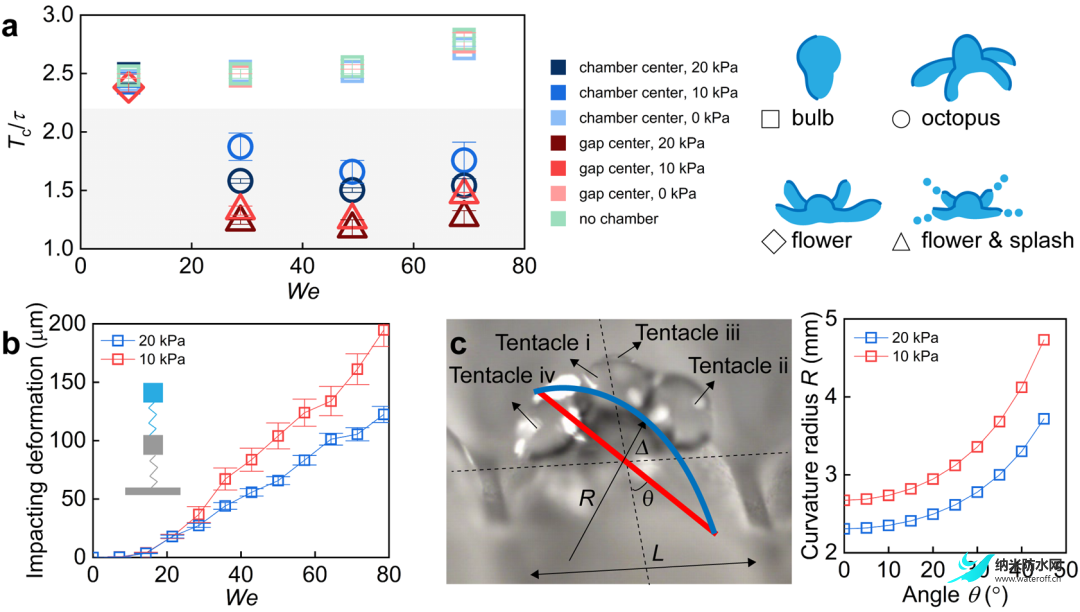
圖3 氣動可編程超疏水表面的抗液性能
研究團隊還展示了氣動可編程表面的液滴操縱能力。通過編程指定的單元,可以驅動靜置液滴滾動并改變滾動方向(圖4a),可以觸發沖擊液滴定向彈跳并改變彈跳方向(圖4b)。據此,可在表面編程形態通道來實現液滴混合;編程形態梯度來實現液滴定向傳輸;結合通道與梯度,可將上述液滴操縱能力從一維(X方向)拓展為二維(XY平面)(圖4c)
 圖4 氣動可編程超疏水表面的液滴操縱
圖4 氣動可編程超疏水表面的液滴操縱
