-
 湖北單相電機(jī)供應(yīng)商
湖北單相電機(jī)供應(yīng)商永磁同步電機(jī):永磁同步電機(jī)具有結(jié)構(gòu)簡單,體積小、效率高、功率因數(shù)高等優(yōu)點(diǎn)。永磁同步電機(jī)已經(jīng)在冶金行業(yè)、陶瓷行業(yè)、橡膠行業(yè)、紡織行業(yè)等行業(yè)中、低壓電動(dòng)機(jī)中獲得業(yè)績,并逐步積累設(shè)計(jì)和運(yùn)行經(jīng)驗(yàn)。分類:按照永磁體結(jié)構(gòu)分類:表面永磁同步電動(dòng)機(jī)、內(nèi)置式永磁同步電動(dòng)機(jī)。按照...
2025-03-31 -
 重慶90千瓦電機(jī)價(jià)格表
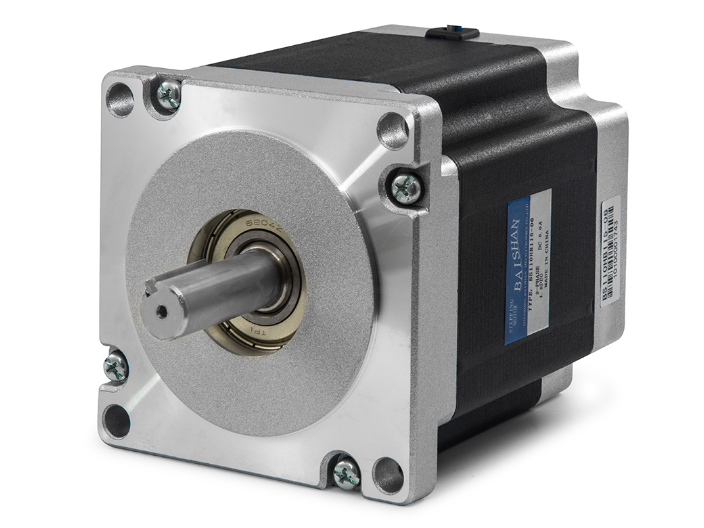
重慶90千瓦電機(jī)價(jià)格表86系列BAISHAN二相混合式步進(jìn)電機(jī)適用于對(duì)扭矩和功率有較高要求的中型自動(dòng)化設(shè)備。其電機(jī)外徑為86mm,相比42系列尺寸更大,能容納更多的繞組匝數(shù)和更強(qiáng)的永磁體。額定電壓一般在48V至110V之間,可適應(yīng)不同工業(yè)電源環(huán)境。相電流范圍通常為3A至8A,較大的...
2025-03-31 -
 河南1000千瓦電機(jī)廠家
河南1000千瓦電機(jī)廠家86系列BAISHAN二相混合式步進(jìn)電機(jī)在工業(yè)領(lǐng)域有著廣泛的應(yīng)用。在工業(yè)機(jī)器人領(lǐng)域,它常被用于機(jī)器人關(guān)節(jié)的驅(qū)動(dòng),憑借其強(qiáng)大的扭矩輸出和精確的角度控制,能讓機(jī)器人手臂靈活且準(zhǔn)確地抓取和放置物品,在汽車零部件裝配線上,可精確地將零部件安裝到指定位置。在大型自動(dòng)化生...
2025-03-31 -
 天津變頻電機(jī)供應(yīng)廠家
天津變頻電機(jī)供應(yīng)廠家在與同類產(chǎn)品的激烈競爭中,56系列BAISHAN二相混合式步進(jìn)電機(jī)展現(xiàn)出了優(yōu)異的綜合性能。在能耗方面,BAISHAN運(yùn)用先進(jìn)的節(jié)能技術(shù),使得電機(jī)在運(yùn)行過程中的電能消耗相較于部分競品降低了8%-12%。這一優(yōu)勢在長時(shí)間連續(xù)運(yùn)行的設(shè)備中體現(xiàn)得尤為,能夠降低用戶的用...
2025-03-30 -
 云南1000千瓦電機(jī)多少錢一個(gè)
云南1000千瓦電機(jī)多少錢一個(gè)在與其他品牌同類型號(hào)的步進(jìn)電機(jī)競爭中,106系列BAISHAN產(chǎn)品展現(xiàn)出了的優(yōu)勢。在扭矩輸出方面,同等體積和輸入功率條件下,BAISHAN電機(jī)的扭矩輸出可比部分競品高出20%-30%。在大型挖掘機(jī)的回轉(zhuǎn)驅(qū)動(dòng)應(yīng)用中,這一優(yōu)勢使得挖掘機(jī)能夠更快速、穩(wěn)定地轉(zhuǎn)動(dòng)工作裝...
2025-03-30 -
江西18.5千瓦電機(jī)多少錢一臺(tái)
在與其他品牌同類型號(hào)的步進(jìn)電機(jī)競爭中,106系列BAISHAN產(chǎn)品展現(xiàn)出了的優(yōu)勢。在扭矩輸出方面,同等體積和輸入功率條件下,BAISHAN電機(jī)的扭矩輸出可比部分競品高出20%-30%。在大型挖掘機(jī)的回轉(zhuǎn)驅(qū)動(dòng)應(yīng)用中,這一優(yōu)勢使得挖掘機(jī)能夠更快速、穩(wěn)定地轉(zhuǎn)動(dòng)工作裝...
2025-03-29 -
 重慶18.5千瓦電機(jī)批發(fā)商
重慶18.5千瓦電機(jī)批發(fā)商開關(guān)磁阻電機(jī)的系統(tǒng)特點(diǎn):結(jié)構(gòu)簡單:電動(dòng)機(jī)結(jié)構(gòu)簡單、成本低、可用于高速運(yùn)轉(zhuǎn)。SRM的結(jié)構(gòu)比鼠籠式感應(yīng)電動(dòng)機(jī)還要簡單。其轉(zhuǎn)子機(jī)械強(qiáng)度極高,可以用于超高速運(yùn)轉(zhuǎn)。在定子方面,它只有幾個(gè)集中繞組,因此制造簡便、絕緣結(jié)構(gòu)簡單。電路可靠:功率電路簡單可靠。因?yàn)殡妱?dòng)機(jī)轉(zhuǎn)矩方向...
2025-03-29 -
 廣西37kw電機(jī)價(jià)格
廣西37kw電機(jī)價(jià)格42系列BAISHAN二相混合式步進(jìn)電機(jī)具備諸多性能優(yōu)勢。首先,其定位精度極高,得益于穩(wěn)定的1.8°步距角以及良好的細(xì)分驅(qū)動(dòng)能力,能實(shí)現(xiàn)亞微米級(jí)別的定位,在對(duì)精度要求苛刻的設(shè)備中確保準(zhǔn)確運(yùn)行。其次,電機(jī)響應(yīng)速度快,從靜止到額定轉(zhuǎn)速的啟動(dòng)時(shí)間極短,能迅速對(duì)控制信...
2025-03-29 -
遼寧30千瓦電機(jī)批發(fā)
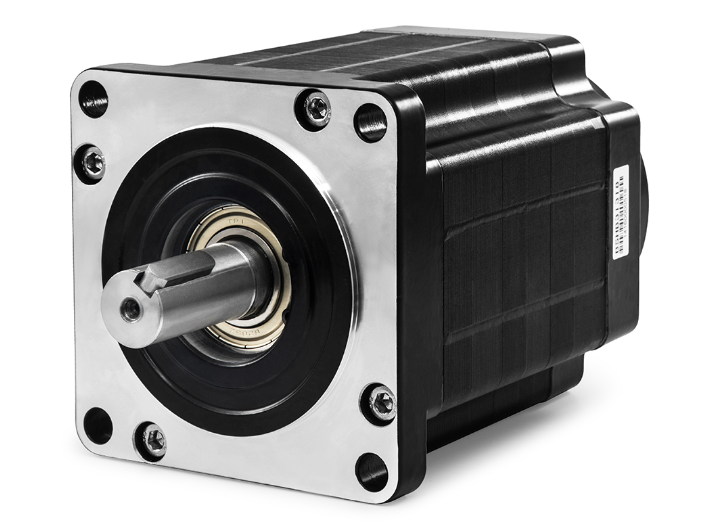
56系列BAISHAN二相混合式步進(jìn)電機(jī)是一款性能優(yōu)良的中等偏小型電機(jī)。其電機(jī)外徑為56mm,設(shè)計(jì)緊湊,適用于對(duì)空間有一定限制的設(shè)備。額定電壓范圍一般在36V至60V,可適配多種電源環(huán)境。相電流通常在2A至4A,通過合理的電流控制實(shí)現(xiàn)穩(wěn)定的電磁驅(qū)動(dòng)。步距角常見...
2025-03-28 -
 陜西高創(chuàng)驅(qū)動(dòng)器要多少錢
陜西高創(chuàng)驅(qū)動(dòng)器要多少錢在電機(jī)實(shí)際使用轉(zhuǎn)速通常較高且對(duì)精度和平穩(wěn)性要求不高的場合,不必選擇高細(xì)分?jǐn)?shù)驅(qū)動(dòng)器,以便節(jié)約成本;在電機(jī)實(shí)際使用轉(zhuǎn)速通常很低的條件下,應(yīng)選用較大細(xì)分?jǐn)?shù),以確保運(yùn)轉(zhuǎn)平滑,減少振動(dòng)和噪音。步進(jìn)電機(jī)驅(qū)動(dòng)器細(xì)分后的主要優(yōu)點(diǎn)為:完全消除了電機(jī)的低頻振蕩。低頻振蕩是步進(jìn)電機(jī)...
2025-03-28 -
 浙江elmo直流驅(qū)動(dòng)器
浙江elmo直流驅(qū)動(dòng)器軟盤驅(qū)動(dòng)器和光盤驅(qū)動(dòng)器都位于機(jī)箱中,只把它們的"嘴巴"露在外面,隨時(shí)準(zhǔn)備"吃進(jìn)"軟盤和光盤。至于硬盤,由于它是不可移動(dòng)的,所以被固定于驅(qū)動(dòng)器之中,也就是說,硬盤和硬盤驅(qū)動(dòng)器是一體的。將軟盤插入軟盤驅(qū)動(dòng)器時(shí)要注意方向,3.5英寸盤在插入時(shí)應(yīng)該使轉(zhuǎn)軸面向下,金屬片...
2025-03-27 -
四川光盤驅(qū)動(dòng)器接線圖
伺服驅(qū)動(dòng)器均采用數(shù)字信號(hào)處理器作為控制點(diǎn),可以實(shí)現(xiàn)比較復(fù)雜的控制算法,實(shí)現(xiàn)數(shù)字化、網(wǎng)絡(luò)化和智能化。功率器件普遍采用以智能功率模塊為重點(diǎn)設(shè)計(jì)的驅(qū)動(dòng)電路,IPM內(nèi)部集成了驅(qū)動(dòng)電路,同時(shí)具有過電壓、過電流、過熱、欠壓等故障檢測保護(hù)電路,在主回路中還加入軟啟動(dòng)電路,以...
2025-03-27 -
 黑龍江總線驅(qū)動(dòng)器多少錢一個(gè)
黑龍江總線驅(qū)動(dòng)器多少錢一個(gè)LED驅(qū)動(dòng)器(LEDDriver),是指驅(qū)動(dòng)LED發(fā)光或LED模塊組件正常工作的電源調(diào)整電子器件。由于LEDPN結(jié)的導(dǎo)通特性決定,它能適應(yīng)的電源的電壓和電流變動(dòng)范圍十分狹窄,稍許偏離就可能無法點(diǎn)亮LED或者發(fā)光效率嚴(yán)重降低,或者縮短使用壽命甚至燒毀芯片。現(xiàn)行的...
2025-03-27 -
 四川臺(tái)達(dá)驅(qū)動(dòng)器下載
四川臺(tái)達(dá)驅(qū)動(dòng)器下載主流的伺服驅(qū)動(dòng)器均采用數(shù)字信號(hào)處理器(DSP)作為控制點(diǎn),可以實(shí)現(xiàn)比較復(fù)雜的控制算法,實(shí)現(xiàn)數(shù)字化、網(wǎng)絡(luò)化和智能化。功率器件普遍采用以智能功率模塊(IPM)為重點(diǎn)設(shè)計(jì)的驅(qū)動(dòng)電路,IPM內(nèi)部集成了驅(qū)動(dòng)電路,同時(shí)具有過電壓、過電流、過熱、欠壓等故障檢測保護(hù)電路,在主...
2025-03-27 -
 云南高創(chuàng)驅(qū)動(dòng)器廠商
云南高創(chuàng)驅(qū)動(dòng)器廠商伺服驅(qū)動(dòng)器經(jīng)常應(yīng)用在注塑機(jī)領(lǐng)域、紡織機(jī)械、包裝機(jī)械、數(shù)控機(jī)床領(lǐng)域等。伺服控制器通過自動(dòng)化接口可很方便地進(jìn)行操作模塊和現(xiàn)場總線模塊的轉(zhuǎn)換,同時(shí)使用不同的現(xiàn)場總線模塊實(shí)現(xiàn)不同的控制模式(RS232、RS485、光纖、InterBus、ProfiBus),而通用變頻...
2025-03-27 -
 黑龍江顯卡驅(qū)動(dòng)器多少錢一個(gè)
黑龍江顯卡驅(qū)動(dòng)器多少錢一個(gè)光盤驅(qū)動(dòng)器是電腦中使用較頻繁的設(shè)備之一,為了減少光盤驅(qū)動(dòng)器的故障,延長光盤驅(qū)動(dòng)器的使用壽命,平常使用時(shí)應(yīng)該注意對(duì)光驅(qū)的維護(hù)保養(yǎng),一般應(yīng)注意下面幾點(diǎn):(1)注意不要讓光驅(qū)受到撞擊、震蕩,因?yàn)楣怛?qū)的激光頭是非常脆弱的。(2)千萬不要用清洗盤清洗光驅(qū),這樣很容易導(dǎo)致...
2025-03-27 -
廣西差分線路驅(qū)動(dòng)器價(jià)格
隨著多媒體電腦的盛行,光盤(CD-ROM)的應(yīng)用越來越普及,大家對(duì)多媒體光盤軟件的需求也越來越大,因此,在自己的電腦上配備一臺(tái)驅(qū)動(dòng)器,可以說是再平常不過的事情。然而,由于其體積較大,以及閃存盤等的普及,越來越多便攜式計(jì)算機(jī)不再內(nèi)置光驅(qū),以騰出空間予其它硬件。驅(qū)...
2025-03-26 -
 天津750w伺服驅(qū)動(dòng)器批發(fā)商
天津750w伺服驅(qū)動(dòng)器批發(fā)商驅(qū)動(dòng)器場效應(yīng)管輸出部分:大功率場效應(yīng)管內(nèi)部在源極和漏極之間反向并聯(lián)有二極管,接成H橋使用時(shí),相當(dāng)于輸出端已經(jīng)并聯(lián)了消除電壓尖峰用的四個(gè)二極管,因此這里就沒有外接二極管。輸出端并聯(lián)一個(gè)小電容(out1和out2之間)對(duì)降低電機(jī)產(chǎn)生的尖峰電壓有一定的好處,但是在使...
2025-03-26 -
 河南軟磁盤驅(qū)動(dòng)器價(jià)格多少錢
河南軟磁盤驅(qū)動(dòng)器價(jià)格多少錢PLC對(duì)步進(jìn)電機(jī)的控制首先要確立坐標(biāo)系,可以設(shè)為相對(duì)坐標(biāo)系,也可以設(shè)為肯定坐標(biāo)系。坐標(biāo)系的設(shè)置在DM6629字中,00—03位對(duì)應(yīng)脈沖輸出0,04—07位對(duì)應(yīng)脈沖輸出1。設(shè)置為0時(shí),為相對(duì)坐標(biāo)系;設(shè)置為1時(shí),為肯定坐標(biāo)系。采用PLC通過步進(jìn)驅(qū)動(dòng)器來控制步進(jìn)電機(jī)...
2025-03-26 -
 山西即插即用型驅(qū)動(dòng)器價(jià)格多少錢
山西即插即用型驅(qū)動(dòng)器價(jià)格多少錢如何根據(jù)伺服電機(jī)參數(shù)對(duì)伺服驅(qū)動(dòng)器選型?先看看伺服驅(qū)動(dòng)器的各方面參數(shù):持續(xù)電流、峰值電流;供電電壓、控制部分供電電壓;支持的電機(jī)類型、反饋類型;控制模式、接受命令的形式;通訊協(xié)議;數(shù)字IO。根據(jù)以上信息我們大致能選出與電機(jī)匹配的伺服驅(qū)動(dòng)器。另外,還要觀察工作環(huán)境...
2025-03-26 -
河南邏輯驅(qū)動(dòng)器接線圖
電機(jī)驅(qū)動(dòng)器所要求的要點(diǎn)①高可靠性:為了保護(hù)電機(jī)驅(qū)動(dòng)器IC不受異常電壓和電流的影響,電機(jī)驅(qū)動(dòng)器需要具備充分的保護(hù)功能,如防止因電源電壓降低而引起誤動(dòng)作的功能等。另外還要求搭載在電機(jī)啟動(dòng)時(shí)或強(qiáng)制停止和堵轉(zhuǎn)時(shí)控制電機(jī)電流的電流限制功能,以及將故障狀態(tài)輸出到外部主機(jī)處...
2025-03-26 -
 上海高創(chuàng)驅(qū)動(dòng)器定制
上海高創(chuàng)驅(qū)動(dòng)器定制步進(jìn)電機(jī)通過細(xì)分驅(qū)動(dòng)器的驅(qū)動(dòng),其步距角變小了,如驅(qū)動(dòng)器工作在10細(xì)分狀態(tài)時(shí),其步距角只為電機(jī)固有步距角的十分之一,也就是說:當(dāng)驅(qū)動(dòng)器工作在不細(xì)分的整步狀態(tài)時(shí),控制系統(tǒng)每發(fā)一個(gè)步進(jìn)脈沖,電機(jī)轉(zhuǎn)動(dòng)1.8°;而用細(xì)分驅(qū)動(dòng)器工作在10細(xì)分狀態(tài)時(shí),電機(jī)只轉(zhuǎn)動(dòng)了0.18°...
2025-03-26 -
山西調(diào)光驅(qū)動(dòng)器定制
為了實(shí)現(xiàn)I/O進(jìn)程與設(shè)備控制器之間的通信,設(shè)備驅(qū)動(dòng)器應(yīng)具有以下功能:(1)接收由設(shè)備單獨(dú)性軟件發(fā)來的命令和參數(shù),并將命令中的抽象要求轉(zhuǎn)換為具體要求,例如,將磁盤塊號(hào)轉(zhuǎn)換為磁盤的盤面、磁道號(hào)及扇區(qū)號(hào)。(2)發(fā)出I/O命令。如果設(shè)備空閑,便立即啟動(dòng)I/O設(shè)備去完成...
2025-03-26 -
 吉林三菱伺服驅(qū)動(dòng)器價(jià)格多少
吉林三菱伺服驅(qū)動(dòng)器價(jià)格多少隨著伺服系統(tǒng)的大規(guī)模應(yīng)用,伺服驅(qū)動(dòng)器使用、伺服驅(qū)動(dòng)器調(diào)試、伺服驅(qū)動(dòng)器維修都是伺服驅(qū)動(dòng)器在當(dāng)今比較重要的技術(shù)課題,越來越多工控技術(shù)服務(wù)商對(duì)伺服驅(qū)動(dòng)器進(jìn)行了技術(shù)深層次研究。伺服驅(qū)動(dòng)器是現(xiàn)代運(yùn)動(dòng)控制的重要組成部分,被寬泛應(yīng)用于工業(yè)機(jī)器人及數(shù)控加工中心等自動(dòng)化設(shè)備中。...
2025-03-26 -
 安徽步進(jìn)驅(qū)動(dòng)器多少錢一個(gè)
安徽步進(jìn)驅(qū)動(dòng)器多少錢一個(gè)進(jìn)入電腦市場,您或許會(huì)覺得眼花繚亂,不用擔(dān)心,只要記住前面講過的幾個(gè)性能指標(biāo),就一定能買一個(gè)適合自己的光盤驅(qū)動(dòng)器,請(qǐng)您考慮以下幾點(diǎn):(1)接口類型,光驅(qū)常見接口有IDE、EIDE和SCSI幾種(詳見硬盤的接口介紹)。如果沒有特殊要求,選擇價(jià)格便宜的IDE或EI...
2025-03-25 -
 河南高創(chuàng)驅(qū)動(dòng)器
河南高創(chuàng)驅(qū)動(dòng)器DM265MA是基于DSP控制的兩相步進(jìn)電機(jī)驅(qū)動(dòng)器。它是將先進(jìn)的DSP控制芯片和獨(dú)特的控制電路結(jié)合一起所構(gòu)成的新一代全數(shù)字步進(jìn)電機(jī)驅(qū)動(dòng)器。該驅(qū)動(dòng)器為客戶提供了4段7位LED和4個(gè)按鍵,客戶可根據(jù)實(shí)際應(yīng)用,自行通過按鍵對(duì)各參數(shù)進(jìn)行設(shè)定。設(shè)定的參數(shù)會(huì)自動(dòng)記憶、存儲(chǔ)...
2025-03-25 -
陜西軟磁盤驅(qū)動(dòng)器多少錢一個(gè)
步進(jìn)驅(qū)動(dòng)器可分為兩部分一部分是環(huán)形分配器,另一部分是功率放大。環(huán)形分配器:要是接收3種信號(hào)分別為:脈沖信號(hào),方向信號(hào),脫機(jī)信號(hào)。然后再對(duì)脈沖信號(hào)進(jìn)行分配,去控制功率放大器相應(yīng)的晶體管導(dǎo)通,然后使步進(jìn)電機(jī)的線圈得電。從這里我們可以看出,步進(jìn)電機(jī)要運(yùn)轉(zhuǎn)那么必須要輸...
2025-03-25 -
 北京攝像頭驅(qū)動(dòng)器價(jià)格多少
北京攝像頭驅(qū)動(dòng)器價(jià)格多少伺服驅(qū)動(dòng)器是用來控制伺服電機(jī)的一種控制器,作用類似于變頻器作用于普通交流馬達(dá),屬于伺服系統(tǒng)的一部分。目前主流的伺服驅(qū)動(dòng)器均采用數(shù)字信號(hào)處理器(DSP)作為控制重點(diǎn),可以實(shí)現(xiàn)比較復(fù)雜的控制算法,實(shí)現(xiàn)數(shù)字化、網(wǎng)絡(luò)化和智能化。功率器件普遍采用以智能功率模塊(IPM)...
2025-03-25 -
湖北差分線路驅(qū)動(dòng)器價(jià)格表
光盤驅(qū)動(dòng)器的技術(shù)指標(biāo):CPU的占用時(shí)間(CPULoading),CPU的占用時(shí)間是指光盤驅(qū)動(dòng)器在維持一定的轉(zhuǎn)速和數(shù)據(jù)傳輸率時(shí)所占用CPU的時(shí)間,它也是衡量光盤驅(qū)動(dòng)器性能好壞的一個(gè)重要指標(biāo)。CPU占用時(shí)間越少,其整體性能就越好。數(shù)據(jù)緩沖區(qū)(Buffer),數(shù)據(jù)緩...
2025-03-25 -
 江蘇安川驅(qū)動(dòng)器報(bào)價(jià)
江蘇安川驅(qū)動(dòng)器報(bào)價(jià)步進(jìn)電機(jī)驅(qū)動(dòng)器,其實(shí)就是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。首先步進(jìn)驅(qū)動(dòng)器會(huì)接收到一個(gè)脈沖信號(hào),然后它按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度,它的旋轉(zhuǎn)是以固定的角度一步一步運(yùn)行的。同時(shí)可以通過控制脈沖的個(gè)數(shù)來控制那個(gè)固定角度,從而達(dá)到準(zhǔn)確定位的目的;利用脈沖頻率來控制...
2025-03-25