-
 機車多路視頻拼接系統聯系方式
機車多路視頻拼接系統聯系方式(中篇)主動安全預警系統的5路拼接360全景影像實現,主要依賴于先進的攝像頭技術、圖像處理算法以及系統集成技術。以下是其實現過程的詳細解釋: 色彩校正與增強:為了提高拼接后圖像的清晰度和真實性,還需要對圖像進行色彩校正和增強處理。這包括調整圖像的亮度...
2025-05-17 -
 中國澳門360全景多路視頻拼接系統生產廠家
中國澳門360全景多路視頻拼接系統生產廠家(下篇)AI360全景影像系統8路視頻實時同顯并上傳至智慧云平臺的技術和應用,是現代監控和安全管理領域的一項重要創新。以下是對該技術的詳細解析: 三、上傳至智慧云平臺數據上傳:通過4G通信技術,AI360全景影像系統能夠將實時視頻數據上傳至智慧云平臺...
2025-05-17 -
 車載360全景影像
車載360全景影像車侶360全景影像系統與超聲波雷達融合使用可以帶來以下的使用價值:提供更四周的感知能力:360全景影像系統可以提供全可視的視覺信息,能夠實時監測和識別環境中的物體和障礙物,而超聲波雷達可以提供更精確的距離和障礙物探測能力。融合這兩種技術可以使系統對...
2025-05-17 -
 中國澳門4G通信司機行為檢測預警系統
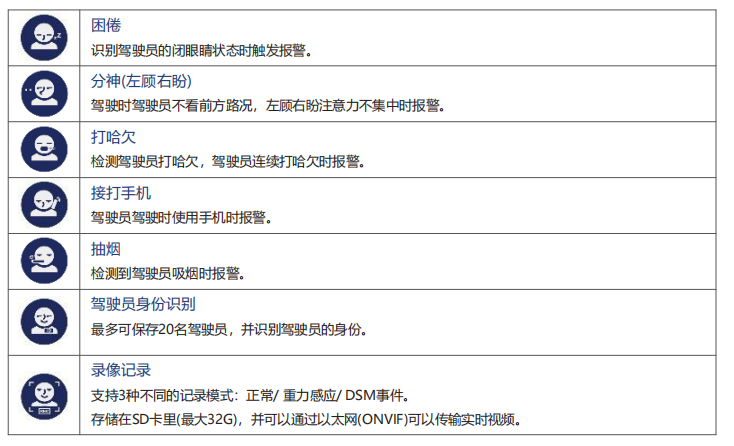
中國澳門4G通信司機行為檢測預警系統(第2篇)車侶獨LI算法的疲勞駕駛預警設備功能簡捷實用,預警實時準確,操作簡單易用,外形美觀靈巧,駕駛員狀態監測精度非常高,疲勞駕駛行為、粗心駕駛行為預警準確率高達99%,獨chuang精細的面部特征鎖定分析功能,實時檢測眼睛狀態變化,預判疲勞狀態準確率達...
2025-05-17 -
 西藏機車司機行為檢測預警系統
西藏機車司機行為檢測預警系統(第1篇)車侶獨LI算法的疲勞駕駛預警設備功能簡捷實用,預警實時準確,操作簡單易用,外形美觀靈巧,駕駛員狀態監測精度非常高,疲勞駕駛行為、粗心駕駛行為預警準確率高達99%,獨CHUANG精細的面部特征鎖定分析功能,實時檢測眼睛狀態變化,預判疲勞狀態準確率達...
2025-05-16 -
 貴州司機行為監測疲勞駕駛預警系統
貴州司機行為監測疲勞駕駛預警系統(第2篇)車侶獨LI算法的疲勞駕駛預警設備功能簡捷實用,預警實時準確,操作簡單易用,外形美觀靈巧,駕駛員狀態監測精度非常高,疲勞駕駛行為、粗心駕駛行為預警準確率高達99%,獨chuang精細的面部特征鎖定分析功能,實時檢測眼睛狀態變化,預判疲勞狀態準確率達...
2025-05-16 -
中國香港防司機行為檢測預警系統
(下篇)自帶算法的疲勞駕駛預警系統是一種智能化的安全設備,它能夠通過分析駕駛員的生理特征、駕駛行為及車輛行駛狀態等信息,實時監測駕駛員的疲勞狀態,并在必要時發出預警信號。以下是對該系統的報警狀態及報警參數的詳細闡述: 綜上所述,自帶算法的疲勞駕駛預警...
2025-05-16 -
 江蘇礦車疲勞駕駛預警系統公司
江蘇礦車疲勞駕駛預警系統公司(下篇)車載自帶算法的疲勞駕駛預警集成MDVR實現云臺管理的原理 -視頻壓縮與存儲:MDVR采用高效的視頻壓縮算法,確保視頻數據存儲和傳輸的效率。-多模態融合:結合圖像和傳感器數據,提高疲勞檢測的準確性。 4.工作流程1.數據采集:攝像頭和傳感...
2025-05-16 -
 中國香港工礦車多路視頻拼接系統推薦廠家
中國香港工礦車多路視頻拼接系統推薦廠家(中篇)4G 360全景環視系統集成毫米波雷達及疲勞駕駛預警在礦場的應用,為礦場作業帶來了革MING性的安全提升。以下是對這一集成系統在礦場應用的具體分析: 二、毫米波雷達毫米波雷達具有很高的探測精確度、分辨率和穿透力,能夠在復雜環境下(如礦塵、煙霧...
2025-05-16 -
北京AI多路視頻拼接系統開發平臺
(上篇)AI360全景影像系統多路視頻實時同顯并上傳至智慧云平臺的重要意義主要體現在以下幾個方面: 一、提升監控效率與準確性全MIAN覆蓋:AI360全景影像系統通過多個攝像頭捕捉圖像并拼接成全景畫面,實現了對監控區域的全MIAN覆蓋,消除了傳統監控...
2025-05-16 -
 四川銷售疲勞駕駛預警系統
四川銷售疲勞駕駛預警系統(第5篇)車侶獨L算法的疲勞駕駛預警設備功能簡捷實用,預警實時準確,操作簡單易用,外形美觀靈巧,駕駛員狀態監測精度非常高,疲勞駕駛行為、粗心駕駛行為預警準確率高達99%,獨C精細的面部特征鎖定分析功能,實時檢測眼睛狀態變化,預判疲勞狀態準確率達95%,獨特...
2025-05-15 -
 3D8路360全景系統
3D8路360全景系統(第1篇)車侶AI 360全景影像系統網口輸出、BSD盲區預警與4G云臺車輛運營管理技術集成到機器人身上,可形成一套多功能、智能化的機器人解決方案,適用于工業巡檢、特種作業、物流運輸等場景。以下為具體應用分析: 一、技術集成與功能實現AI 360全景...
2025-05-15 -
車載360環視攝像頭廠家
360全景影像系統。通過在汽車周圍安裝能覆蓋車輛周邊所有視場范圍的 4 個廣角攝像頭,對同一時刻采集到的多路視頻影像處理成一幅車輛周邊360度的全景俯視圖,然后在中控臺的屏幕上顯示,也可以顯示任何一方的單視圖,可徹底消滅車輛周圍的視覺盲點,讓駕駛員清楚查看車輛...
2025-05-15 -
 公交車360全景影像廠家供應
公交車360全景影像廠家供應車侶360全景影像系統對于車外行人的安全保障具的作用:提供更四周的視野:360全景影像系統通過多個攝像頭組合成全景畫面,可以提供車輛周圍的全可視視野。這使得駕駛員能夠更清楚地觀察到車外行人的存在和行為,避免盲區造成的安全隱患。實時監測和警示:360全景影像系統...
2025-05-15 -
商用車360全景環視設備廠家供應
全景影像系統2D無縫拼接360,隨著技術的發展,針對無縫拼接所出現的情況,拼接縫區域過度,不同畫面光度平衡等技術的發展。顯示效果更好,更直觀的的2D無縫拼接360誕生。司機能夠在車內直觀的觀察到從虛擬車頂向下看的2D俯視圖。很直觀的看出車輛周邊的路面信息。2D...
2025-05-15 -
 上海起重機多路視頻拼接系統技術解決方案
上海起重機多路視頻拼接系統技術解決方案(下篇)主動安全預警系統中的6路視頻拼接技術,其難度主要體現在以下幾個方面: 同時,軟件算法的穩定性和兼容性也是需要考慮的重要因素。 三、應用場景的復雜性多變的道路環境:主動安全預警系統通常應用于復雜的道路環境中,如高速公路、城市道路、山區道路...
2025-05-15 -
山西礦卡多路視頻拼接系統定制開發
(篇一)AI360全景影像集成4G網口輸出和BSD盲區預警系統實現8路視頻實時同顯的技術原理,主要涉及視頻拼接技術、4G通信技術、BSD盲區監測技術,以及系統集成與兼容性技術。以下是對這些技術原理的詳細解析: 一、視頻拼接技術攝像頭布局與采集:在車輛...
2025-05-15 -
 青海360全景多路視頻拼接系統開發平臺
青海360全景多路視頻拼接系統開發平臺(下篇)360°全景影像系統集成胎壓監測、雷達以及疲勞駕駛預警功能,通過多路視頻呈現,為駕駛員提供了全方WEI、多層次的駕駛輔助和安全保障。以下是對該系統的詳細解析: 五、多路視頻呈現將360°全景影像、胎壓監測、雷達以及疲勞駕駛預警等功能集成在一起...
2025-05-15 -
 天津司機行為檢測預警系統進度安排
天津司機行為檢測預警系統進度安排(上篇)疲勞駕駛預警設備在商用車上的推薦安裝位置需要滿足能夠時時刻刻監測到駕駛員面部的條件,以確保設備能夠有效地捕捉到駕駛員的疲勞狀態。以下是一些推薦的安裝位置: 中控臺或儀表盤:這些位置通常位于駕駛員的正前方,且不會被方向盤或其他駕駛操作部件遮擋,...
2025-05-15 -
 新疆掛車多路視頻拼接系統方案商
新疆掛車多路視頻拼接系統方案商(上篇)主動安全預警系統的多路視頻拼接實現的技術原理,主要涉及到視頻拼接技術和圖像處理算法。以下是對這一技術原理的詳細闡述: 一、視頻拼接技術視頻拼接技術是將多個相互之間畫面有重疊的視頻流通過一系列處理步驟,ZUI終拼接成一路完整的全景視頻的技術。這...
2025-05-15 -
 工程車360全景環視系統公司
工程車360全景環視系統公司汽車安裝360全景影像有什么用?全景攝像頭是一項汽車安全配置,與普通倒車影像系統相比,其重中之重在于在車頭,車側增加了多個攝像頭,通過車載顯示屏幕可觀看汽車四周360度全景融合,超寬視角,無縫拼接的適時圖像信息(鳥瞰圖像),了解車輛周邊視線盲區,幫助汽車駕駛員...
2025-05-15 -
 車載360全景影像廠家供應
車載360全景影像廠家供應360度全景攝像就是一次性收錄前后左右的所有圖像信息,沒有后期合成,更沒有多鏡頭拼接。其原理依據仿生學采用物理光學的球面鏡透射加反射原理一次性將水平360度,垂直180度的信息成像,再采用硬件自帶的軟件進行轉換,以人眼習慣的方式呈現出畫面。一般來說,焦距越短,...
2025-05-15 -
挖掘機多路360全景影像
(下篇)車載AI360全景影像系統的技術原理: AI算法通過深度學習等技術對圖像中的目標進行特征提取和識別,能夠準確地識別出車輛周圍的行人、車輛、障礙物等物體。物體識別精度:AI算法通過不斷優化和訓練,提高物體識別的精度和魯棒性。它能夠應對不同光照條...
2025-05-14 -
 天津司機行為檢測預警系統開發商
天津司機行為檢測預警系統開發商(上篇)在疲勞駕駛集成MDVR系統中,TTS喇叭和對講手柄是怎樣通過智慧云平臺下發指令對車端進行交互控制,監控實時作業情況? 在疲勞駕駛集成MDVR(MobileDigitalVideoRecorders,車載數字視頻錄像機)系統中,TTS喇叭和對講...
2025-05-14 -
 湖南機車疲勞駕駛預警系統
湖南機車疲勞駕駛預警系統(中篇)自帶算法的疲勞駕駛預警系統是一種智能化的安全設備,它能夠通過分析駕駛員的生理特征、駕駛行為及車輛行駛狀態等信息,實時監測駕駛員的疲勞狀態,并在必要時發出預警信號。以下是對該系統的報警狀態及報警參數的詳細闡述: 這是為了確保在正常的駕駛速度下,...
2025-05-14 -
山東AI多路視頻拼接系統方案商
(上篇)8路視頻實時顯示于智能顯控終端的AI360全景影像系統,是通過一系列先進的技術和算法實現的。以下是對其工作原理的詳細解析: 一、系統組成該系統主要由以下部分組成:超廣角高清攝像頭:通常安裝在車輛的前后以及兩側,具備廣角拍攝能力,能夠捕捉到車輛...
2025-05-14 -
上海建筑物多路視頻拼接系統方案商
(篇三)AI360全景影像集成4G網口輸出和BSD盲區預警系統實現8路視頻實時同顯的技術原理,主要涉及視頻拼接技術、4G通信技術、BSD盲區監測技術,以及系統集成與兼容性技術。以下是對這些技術原理的詳細解析: 四、系統集成與兼容性技術硬件集成:AI3...
2025-05-14 -
吉林SUV疲勞駕駛預警系統
(下篇)自帶算法的疲勞駕駛預警系統采用獨特的圖像識別技術,能夠在復雜多變的駕駛環境中有效監測駕駛員的疲勞狀態,同時避免外界光源對監測效果的干擾。以下是對該系統如何避免外界光源干擾的詳細闡述: 六、實際應用中的驗證與調整在實際應用中,系統會根據不同場景...
2025-05-14 -
 4路AI360全景影像系統|4路AI360環視影像系統|4路AI360全景影像集成系統
4路AI360全景影像系統|4路AI360環視影像系統|4路AI360全景影像集成系統AI360全景影像系統功能及應用場景 該系統以多路視頻拼接、智能接口擴展、環境感知集成為核X,針對礦車、物流、挖掘及機器人等高危作業場景,提供全景監控、遠程控制及環境安全檢測功能。以下從功能模塊、技術特性及行業應用三方面展開分析: 一、核X功...
2025-05-14 -
 西藏4G通信主動安全預警系統定制開發
西藏4G通信主動安全預警系統定制開發(第3篇)車侶主動安全一體機是一種高度集成的車輛安全設備,通過多技術融合與云平臺協同,為交通管理提供了智能化解決方案。以下是對其功能的詳細闡述: 6,智能限速與控速:一體機能夠實時監測行人和其他車輛,當行人進入預警區域時,觸發語音告警,并輸出開關信號...
2025-05-14